Autori: Paul Suvarov, Alexandru Stancu
Universitatea „Dunrea de jos” Galati, Facultatea de inginerie electrica si electronica
Universitatea „Dunrea de jos” Galati, Facultatea de Stiinta calculatoarelor
An aparitie: 2008
Sistemele automate
Sistemele automate devin din ce in ce mai complexe datorita progresului tehnologic rapid, numarul de senzori creste marind cantitatea de informatie ce trebuie comunicata, totodata si complexitatea sistemului electic. Din acest motiv a fost necesara dezvoltarea unui sistem de comunicatie simplu, ieftin si flexibil.
Magistrala CAN (Controller Area Network)
Magistrala CAN a fost dezvoltata de catre firma Germana Bosch in mijlocul anilor 1980. Aceasta magistrala s-a raspandit tot mai mult in industrie, pe piata echipamentelor medicale, piata echipamentelor de masurare si testare.
Protocolul de comunicare CSMA/CD
Protocolul de comunicare care sta la baza magistralei CAN este CSMA/CD (Carrier Sense Multiple Access with Collision Detection). Acest protocol ofera, tuturor nodurilor, acces simultan la mediul de comunicatie.
Fiecare nod trebuie sa asculte magistrala pentru o anumita perioada de inactivitate inainte de a incerca emiterea unui pachet (Detectie de purtatoare – CS). Dupa ce aceasta perioada de inactivitate se scurge, fiecare nod are sanse egale pentru emisie (Acces multiplu – MA).
Daca doua noduri in retea incep sa emita in acelasi timp, acestea vor detecta coliziunea si vor actiona pentru a elimina conflictul (Detectare de coliziune – CD).
Pentru arbitrarea conflictului este folosita o logica hardware nondistructiva. Aceasta arbitrare are loc fara coruperea pachetului prioritar, si totodata fara introducere de intarzieri.
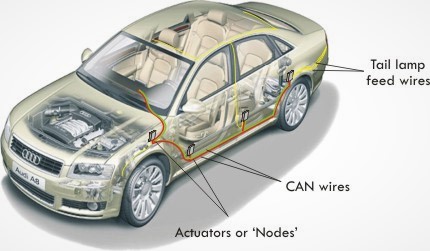
Magistrala CAN-BUS
CAN-BUS foloseste o magistrala diferentiala, formata din 2 fire torsodate. Acest lucru ofera o mare imunitate la zgomot.
Viteza de semnalizare este de maxim 1Mbit/s pentru o magistrala cu lungimea de 40m. Lungimea magistralei poate fi marita cu pretul vitezei de semnalizre (pentru 1Km avem 360kbit/s).
Structura cursului
- Introducere
- Caracteristici CAN-BUS
- Descrierea sistemului
- Schema bloc a sistemului
- Nodul de executie
- Circuitul de comunicare CAN-BUS
- Nodul de monitorizare si control
- Relatiile software
- Exemplu de sistem automat implementat pe CAN-BUS
- Concluzii
- Propuneri de lucru pentru viitor
Pentru a intelege mai bine comunicatia CAN (Controller Area Network), am atasat materialul video de mai jos:

Am lucrat cu CAN. Semnal diferential cam ca la USB cu D+ si D-. Aveai transceiver CAN, un intagrat cu semnale Rx Si Tx parca, un fel de TTL. Pachetul de date serial incepea cu un ID, de exemplu ID, viteza si apoi valoarea. Cand doua noduri doreau sa emita in acelasi timp, unul detecta emisia celuilalt si lasa sa emita pe cel cu prioritate mai mare.